(原标题:特斯拉无人驾驶功能更新 离完全无人驾驶又近一步)
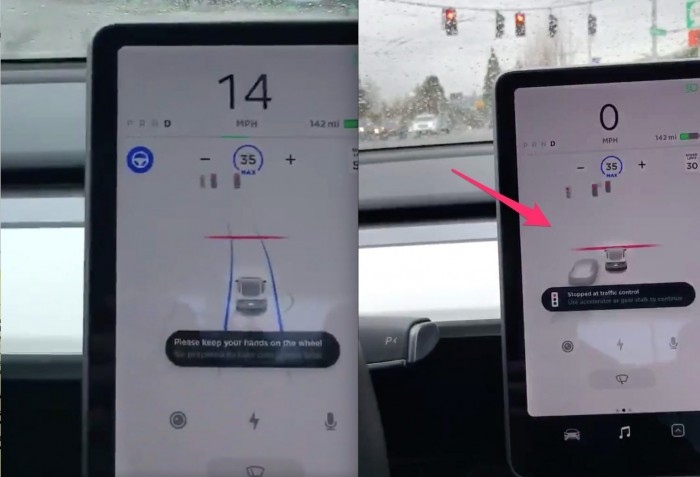
据外媒报道,特斯拉首席执行官埃隆·马斯克表示,公司将在未来几周内在美国推出交通信号灯和停车标志自动识别功能。特斯拉在功能介绍中称,同时启动自动转向和交通感知巡航控制时,汽车可以在交通信号灯和停车标志处自动停车。
这两项功能都包含在特斯拉的基础版Autopilot中,它是该公司目前所有车辆的标准配置。
特斯拉的红绿灯和停车标志识别已经筹备了很长时间。2019年3月,特斯拉发布了自动转向停车警告新功能,当司机接近十字路口时,系统自动提醒司机,要求司机接管电动车的操控。
此次推出的红绿灯和停车标志识别功能与自动停车功能,将进一步提升Autopilot的安全性。
特斯拉表示,由于因为世界各地不同的交通规则以及相关的政策法规,与美国车主相比,其他几个国家客户的Autopilot更新将等待更长时间。
在此之前,有超60万辆特斯拉配备完全无人驾驶芯片,该芯片拥有高达60亿的晶体管,每秒可完成144万亿次的计算,能同时处理每秒2,300帧的图像,并且每辆车有两个这种芯片,可以同时处理相同的数据。
其在随后申请了一项专利,内容是如何从其庞大的客户车队中获取训练数据,以训练其无人驾驶神经网络。
无人驾驶如何实现
目前无人驾驶的关键技术为感知 、规划和执行三部分,具体涉及传感器、数据处理、机器学习、SLAM与传感器融合、路径规划等多个领域。
其中,感知通过车辆传感器硬件交互与通信,规划主要负责汽车的行为等的计算,控制则是对汽车元器件的电子化操作。
感知主要是通过环境感知进行定位。
在环境感知阶段,需要获取大量周围环境信息,确保自动车对车身周围环境的正确理解和对应决策。
环境感知是对环境的场景理解能力,例如,车道线标志及标线、红绿灯识别、交通信号及标识牌识别、行人车辆检测、障碍物的类型等数据理解分析分类,定位是对感知结果的后处理,通过定位功能从而帮助自动车了解其相对于所处环境的位置。
在规划部分,根据无人驾驶汽车传感器套件捕获的原始数据和已有地图,无人驾驶系统需要通过同时定位和映射算法构建和更新具体的环境地图,跟踪其具体定位,从而开始规划从一个点到另一个点的路径。
目前,机器学习的最新进展在于有效处理无人驾驶汽车传感器产生的数据,减少计算成本。此外,芯片制造和微型化的进步正在提高可安装在无人驾驶汽车上的计算能力。
5G的高宽带、低延时将帮助基于网络的数据处理进行自主操作。
执行是系统按照决策结果对车辆进行控制。
车辆的各个操控系统都需要可以通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。
感知定位如同驾驶员的眼睛,规划决策相当于驾驶员的大脑,而执行控制就好比驾驶员的手脚。执行控制是无人驾驶真正落地的基础。
特斯拉完全无人驾驶计划
特斯拉电动车的最大卖点是其无人驾驶系统(目前的技术水平属于二级“辅助驾驶”级别),该公司每隔一段时间就会推出无人驾驶系统的升级功能。
特斯拉无人驾驶系统工作的基本原理,是对道路上各种物体和对象进行准确的识别,其行车电脑将会根据这些识别的路况做出各种驾驶操控动作。
按照计划,特斯拉公司将会在今年推出完全自动驾驶。该公司过去发布的视频显示,从住所到公司,无需司机掌握方向盘,车辆能够全程自我操控。这在某种程度上预示着在完全无人驾驶实现之后,车主可以在车上打电话、玩手机甚至是处理公务。
马斯克甚至计划设立无人的士公司,让大量的无人驾驶电动车在街头自由行驶、通过手机软件获得乘客订单。
